RE2 Robotics Inc. today announced that it has received funding from the U.S. Navy to develop a system that enables “coupled control” of a remotely operated vehicle (ROV) and robotic manipulator through a single control system. The Coupled Locomotion and Manipulation System, or CLAMS Project, will combine the control systems for the robotic arms and the ROV into one unit, improving coordination of the underwater manipulator and the ROV’s movements, said the company.
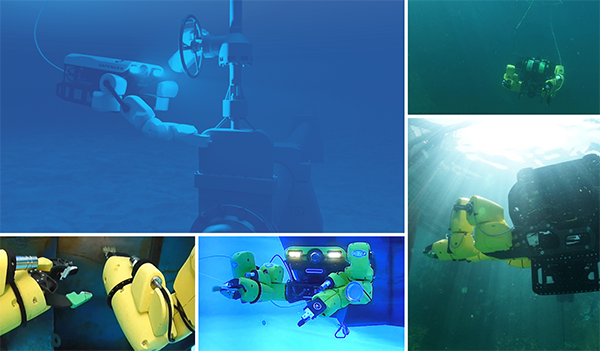
“The goal of CLAMS is to improve control of our RE2 Sapien Sea Class arms mounted on the VideoRay Defender ROV by addressing the two components as a unified system,” stated David Lee, director of product management at RE2 Robotics. “This will allow topside operators to have more control over semi-autonomous operations while the integrated system is working underwater.”
The Pittsburgh-based company provides the RE2 Sapien arms, the RE2 Detect computer vision software, and the RE2 Intellect autonomy software to enable intelligent mobile manipulation systems that operate in a variety of complex indoor and outdoor environments. RE2 Robotics said its systems enable the aviation, construction, defense, energy, and medical industries to conduct remote operations, improve worker safety and efficiency, and reduce operational costs.
The company did not specify the amount of Phase I Small Business Innovation Research (SBIR) funding.
RE2 CLAMS combines controls
CLAMS will enable topside operators to control a system’s robotic arms and ROV simultaneously using one control station by combining RE2 Robotics' new Coupled Remote Link Software (CTRLS) and the System Unification Model (SUM) to enable interoperability between ROV and robotic arm systems.
CTRLS allows the topside ROV operator to send mission goals to the SUM module located on the vehicle. This enables the vehicle and robotic arms to quickly and efficiently achieve those mission goals, making it easier for operators to complete complex underwater tasks, said RE2.
“Currently, robotic arms and ROVs are controlled with separate control systems,” said Jorgen Pedersen, president and CEO of RE2 Robotics. “CLAMS will enable both the robotic arms and the mobile platform to be operated with a single control unit.”
“Integrating these platforms will enable users to increase efficiency by eliminating the need for an operator to monitor two separate control stations while completing a mission,” he said.
In addition to defense applications, CLAMS will benefit industries that use underwater manipulation systems to conduct routine inspection and maintenance tasks, such as the oil and gas and renewable energy industries, according to RE2 Robotics.
Article topics
Email Sign Up

Related Marine News












