
Getty Images
Mobile robots for industrial inspection have a number of ways to navigate without GPS.
Get news, papers, media and research delivered. Sign up for our free newsletters.
Stay up-to-date with news and resources you need to do your job. Research industry trends, compare companies and get weekly market intelligence with Robotics 24/7.

Getty Images
Mobile robots for industrial inspection have a number of ways to navigate without GPS.
Inspecting high-value, high-maintenance assets in the power, oil and gas, or paper industries is often a difficult process.
Manufacturing sites, industrial plants, and refineries are home to complex machinery, electrical equipment, and vessels that are incredibly difficult to inspect. They also involve navigating dangerous conditions such as high-heat environments or dealing with hazardous materials.
For this reason, much of the time, it’s too difficult for humans to carry out basic, safe inspections. Therefore, engineers are increasingly turning to robots to augment or replace people in hazardous use cases.
However, these industrial environments are often devoid of GPS, which can make it impossible for robots that rely on this technology to position themselves in order to navigate.
Instead, ultrasonic and localization technologies are emerging for navigation to pin-point damage mechanisms, as well as provide reproducible data. These deliverables can help predict the future safety of the sites being inspected.
The main reason for sending mobile robots for inspection, maintenance, and repair is to avoid putting employees in dangerous situations. Inspections are necessary for identifying, predicting, and managing problems that could require maintenance to guarantee the longevity of industrial plant operations.
But relying on humans to carry out traditional inspection methods means that health, safety, reliability, and speed can be overlooked. Instead, robotic navigation can reduce human exposure to potential risks, increase the quality and efficiency of the data being collected, as well as minimize interruptions to the inspection process.
While robotics are a great solution to this problem, they aren’t always reliable. When it comes to machines that are intricately shaped or have a complicated, curved structure, GPS satellite signals are easily blocked.
GPS-based robots also struggle to operate in confined spaces such as boilers, tank floors, fuel silos, inside piping, and vessels (more on these later), which limits the collection of inspection data.
However, there are some other forms of technology that enable robots and drones to inspect equipment in these complex environments.
In recent years, engineers have been perfecting robotic ultrasonic testing technology, a non-destructive form of inspection that assesses the quality of a particular component without damaging it.
There are several different types of this technology that work for inspecting GPS-denied environments.
This method uses high-frequency (ultrasound) sound waves to measure the different geometric and physical qualities of different materials. Not only will this technology indicate the size and location of a particular problem, but it will also be able to provide indications as to what the problem is.
This technique, which can also be adapted to a method known as Rapid AUT, can be used to map corrosion, obtain data or measurements, and identify cracks or defects.
This technology operates using a series of small transducers -- devices that convert energy from one form to another -- whose pulses are controlled by a computer. The results from these pulses can determine whether or not there are flaws in the material being inspected.
This method is particularly useful for inspecting welds, corrosion, and measuring material thickness.
Robots use this technology to inspect and determine the thickness of concrete elements with one-sided access. It uses a transducer to emit a high-frequency acoustic pulse which is reflected back to the same transducer. This pulse is then transformed into an electric signal and displayed on a screen to detect cracks, fissures, and defects in materials.
Localization technologies, on the other hand, identify exactly where objects are in relation to other objects. If the localization data collected on an object is good enough, it can then be used to build a computer model of the asset being inspected and predict potential problems.
Both of these technologies require a clear line of sight from the sensor to receive their functions, which means that robots that use this technology must be equipped with sensors.
The two most common types of sensors which do not rely on a straight line of sight to report information are wheel motion sensors, which estimate change in position over time, and inertial measurement units (IMUs). IMUs measure acceleration, angular rate, and orientation.
This technology works using rotating lasers, which convert angle measurements from robotic total stations (RTS) into time measurements. The laser beams sweep large surface areas, which makes them resistant to obstructions.
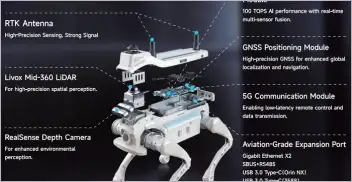
Lidar is a method for determining distances or ranges. It works by targeting an object with a laser and then measuring the time it takes for the beam reflection to return from the object surface. Lidar can measure distances roughly and is great for avoiding obstacles and detecting objects because of its field of view.
However, this method is best used outside of enclosed structures such as boilers, tanks, or inside pipes, because these have few unique features for the laser to bounce off.
Such sensors can also be easily confused by nearby structures and their shape and size, which can result in extra information when it comes to inspections.
Now that we’re aware of the different types of technology available for infrastructure inspection, it’s time to focus on some of the environments in which they can be applied.
Contrary to what we have discussed, not all GPS-denied environments involve confined space entry (CSE), which means they’re accessible to humans.
However, despite their accessibility, even non-CSE areas of high-value assets can still be dangerous for humans. And for many, if not all, organizations, safety is the No. 1 concern, so keeping human beings out of harm’s way is essential.
One of the non-CSE, GPS-denied areas where robotics can come in handy are tank floors. Using robots to inspect tank floors allows humans to reduce the amount of time they would be exposed to risk if they were taking measurements and inspecting the floors themselves.
Another advantage of using robots to inspect tank floors is the fact that they can take 3D measurements, such as a contour map of a floor settlement. They can also measure as many control points as necessary, as tank floors have relatively few obstructions, giving the robots a clear line of sight.
Other GPS-denied environments where robotics are useful inevitably include CSE areas such as piping. In this environment, light-based metrology (LBM) technology is most useful, as there are no single locations in pipes offering a line of sight to all sides.
LBM technology means you can place multiple emitters around the asset with overlapping coverage. It also automatically handles obstructions, which means that humans are only needed for monitoring purposes and don’t have to put themselves at risk.
To sum up, using robotic technology for high-value, high-maintenance asset inspection — where GPS-denied environments are common — can provide an unprecedented understanding of the health and state of complex machinery.
Robots offer benefits to human workers, who can use them to avoid exposing themselves to unnecessary levels of risk. In addition, they can go above and beyond by gathering data for predicting the health of machinery, using tools such as 3D mapping and localization technology.
For plant managers, this forward-thinking approach to inspection is not only safer, but essential to long-term success.

Ed Bryner is director of engineering at Gecko Robotics Inc., a robotic non-destructive testing (NDT) inspection services company operating across a range of industries, including power generation, oil, and natural gas.
Autonomous mobile systems come in all shapes and sizes, from wheeled to walking robots, drones, and even large industrial vehicles. But deploying these systems for successful autonomous tasks, at scale, continues to be a complex equation that many are struggling to solve, and no complete robot solutions like these are available “out of the box” just yet.
GENISOM AI makes ICRA debut at conference in Vienna
World's first omni-modal evaluation including tactile sensing for…

North America’s largest robotics and automation event winds down

Automate’s largest day ever draws huge crowds to McCormick Place