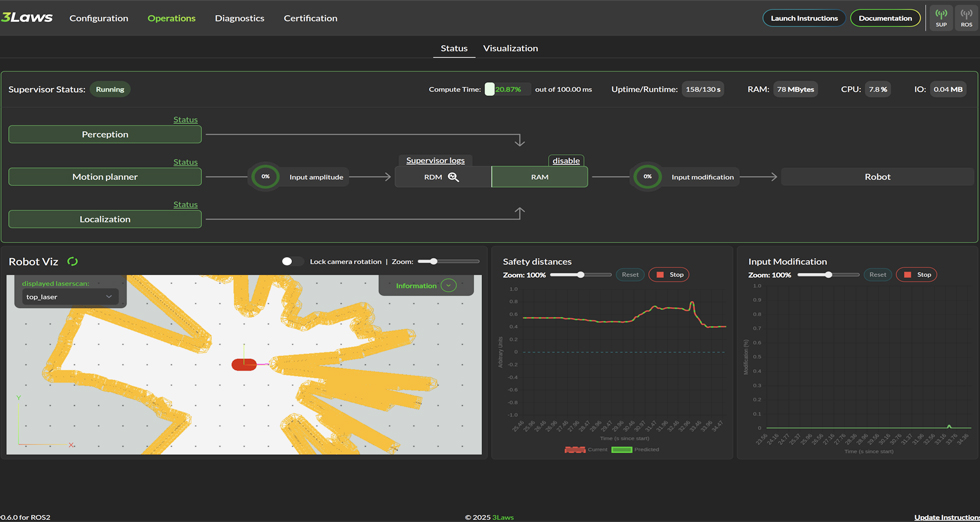
3Laws
Dynamic safety is the key to updating robotic safety standards.
Get news, papers, media and research delivered. Sign up for our free newsletters.
Stay up-to-date with news and resources you need to do your job. Research industry trends, compare companies and get weekly market intelligence with Robotics 24/7.

3Laws
Dynamic safety is the key to updating robotic safety standards.
Editor’s Note: This article was written by Amir Sharif, founder and COO of 3Laws. He is a member of Robotics 24/7’s Executive Advisory Board.
Robotic safety standards were forged in an era dominated by fixed industrial arms, hard fences and worst-case assumptions. The robotics landscape has changed dramatically.
Robots learn new skills through foundational AI models, mobile platforms navigate dynamic environments and legged robots walk among us. Yet the safety frameworks that govern robotic deployment have not kept pace.
It is time for a fundamental rethink of robotic safety.
At their core, today’s cornerstone standards, namely ISO 10218-1:2025 and ISO 10218-2:2025, focus on industrial robots and their integration into structured industrial applications, explicitly including robot cells as a primary organizing concept. Supplementary guidance, such as ISO/TS 15066:2016, addresses collaborative industrial robots, but it still assumes comparatively bounded operating modes and environments.

This “cell” model reveals a deeper mismatch: programmable devices (robots) need “programmable infrastructure” (cages). Historically, we made infrastructure physical via fixed fences and static guarding, while the robot inside remained reprogrammable. That worked when robots were predictable and stationary. But in a world of dynamic autonomy and continuous re-tasking, fixed cages become the bottleneck. The only scalable alternative is a virtual, programmable cage, or a safety envelope that updates in software in real time. And that is only achievable with dynamic safety.
So where are the gaps?
Foundational AI models can teach robots new physical tasks ranging from grasping irregular objects to dynamic motion planning. But AI behavior is inherently stochastic: while a robot may learn a task, it does not guarantee deterministic execution. Many existing safety practices still assume predictable, pre-programmed trajectories where the “worst-case” scenario is reasonably bounded and documentable under traditional machinery risk methods such as ISO 12100.
To address this limitation, safety must evolve from static worst-case definitions to dynamic safety models: zones and tolerances that shift in real time based on the robot’s capabilities and the motion vectors of surrounding objects. Instead of a fixed exclusion zone, safety boundaries should contract or expand as the robot and people move relative to one another, thereby creating that “virtual cell” that can be reconfigured as easily as the robot itself.
For warehousing and logistics, the relevant safety foundation often shifts away from robot-cell assumptions toward standards explicitly covering mobile automation, most notably ISO 3691-4:2023, which specifies safety requirements for driverless industrial trucks and even lists “autonomous mobile robot” as an example.
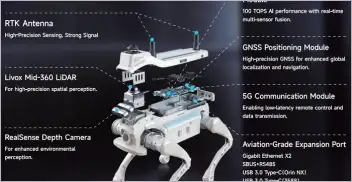
But legged robots, especially dynamically balancing humanoids and quadrupeds, introduce hazards such as balance recovery, fall dynamics, terrain interaction, whole-body and contact during locomotion that do not map cleanly to either “robot cells” or “driverless trucks.”
Notably, ISO itself reflects that gap: ISO/WD 25785-1 is a working draft under development for “dynamically stable industrial mobile robots” explicitly including legged forms (e.g., bipedal and quadrupedal). The fact that this is still under development underscores the challenge: legged industrial robots are arriving faster than harmonized, published safety standards.
Safety programs have traditionally leaned on expensive “safety-rated” components and rigid architectures that can inflate costs and constrain performance. A more reasonable approach is system-level redundancy: using diverse, lower-cost sensors in an array and validating the safety function as an engineered whole.
This aligns with machinery functional safety design principles in ISO 13849-1:2023, which provides methodology and requirements for safety-related control systems, including software design.
AI excels at learning and perception, but today’s neural models are not inherently deterministic. Safety systems must be built so that even if AI perception fails or “hallucinates,” the underlying safety architecture behaves predictably. This is exactly the territory of functional safety: IEC 61508-1:2010 defines requirements for E/E/PE safety-related systems, and IEC 62061:2021 applies functional safety principles to machinery safety-related control systems (explicitly positioned within the IEC 61508 framework).
Safety standards must evolve to match the technology they govern. That means dynamic (not static) definitions of risk, standards that fully encompass new robot form factors (especially dynamically stable legged robots, and architectures that combine intelligent perception with a deterministic safety kernel.
Our future robots will not be confined to fenced cells - and our safety standards should not be either.
GENISOM AI makes ICRA debut at conference in Vienna
World's first omni-modal evaluation including tactile sensing for…

North America’s largest robotics and automation event winds down

Automate’s largest day ever draws huge crowds to McCormick Place