Daimon Robotics
Daimon Robotics and Galbot launched RobOmni at ICRA 2026.
Get news, papers, media and research delivered. Sign up for our free newsletters.
Stay up-to-date with news and resources you need to do your job. Research industry trends, compare companies and get weekly market intelligence with Robotics 24/7.

Daimon Robotics
Daimon Robotics and Galbot launched RobOmni at ICRA 2026.
The robotics industry has invested heavily in vision-based perception and increasingly sophisticated AI models. Yet as embodied AI advances toward physical AI and world models, robots are supposed to do more than perceive the world - they are expected to learn to understand and interact with the real world through physical contact.
But when robots interact with the physical world, vision alone is often insufficient. Tasks such as grasping delicate objects, inserting connectors, opening containers, assembling components, or handling deformable materials all rely heavily on contact information.
Humans perform these actions effortlessly because we continuously integrate visual and tactile feedback. Robots, however, still struggle with many of these tasks.
A fundamental question remains unanswered:
How much does tactile sensing actually improve robotic manipulation and physical interaction?
The challenge is not simply developing better tactile sensors, but also measuring their impact for physical AI.
Today, there is no widely adopted, standardized framework for evaluating tactile intelligence in embodied AI. Without a common evaluation framework, the industry lacks a reliable way to quantify progress.
To address this challenge, Daimon Robotics, an embodied intelligence company from Hong Kong, together with Galbot, jointly unveiled their RobOmni at ICRA 2026. As the first omni-modal evaluation benchmark including tactile sensing for physical interaction, it is designed to provide a reproducible and scalable environment for evaluating robot models on contact-rich tasks.
Built on NVIDIA Isaac Sim, RobOmni combines high-fidelity simulation with standardized evaluation scenarios centered on physical interaction.
The platform supports omni-modal observations, including:
This omni-modal approach enables researchers and developers to systematically evaluate how tactile information affects robotic performance under controlled conditions.
Traditionally, tactile systems have focused primarily on force detection - determining whether contact has occurred and measuring how much force is being applied. However, researchers increasingly view tactile as a rich source of information that extends far beyond force alone.
At Daimon Robotics, this concept is described as "omni-modal tactile intelligence". The company's self-developed vision-based tactile sensors are designed to capture multidimensional, high-frequency, high-resolution tactile signals. In addition to contact force, they can provide dense information about contact deformation and slip, while also helping robots infer object properties such as material, geometry, texture, softness, and hardness.
For robots operating in unstructured environments, these signals can be critical. A camera may identify an object, but tactile feedback can help determine whether it is securely grasped, beginning to slip, fragile, rigid, or deformable. The combination of vision and tactile offers a richer understanding of the physical world and may play an important role in advancing dexterous manipulation.
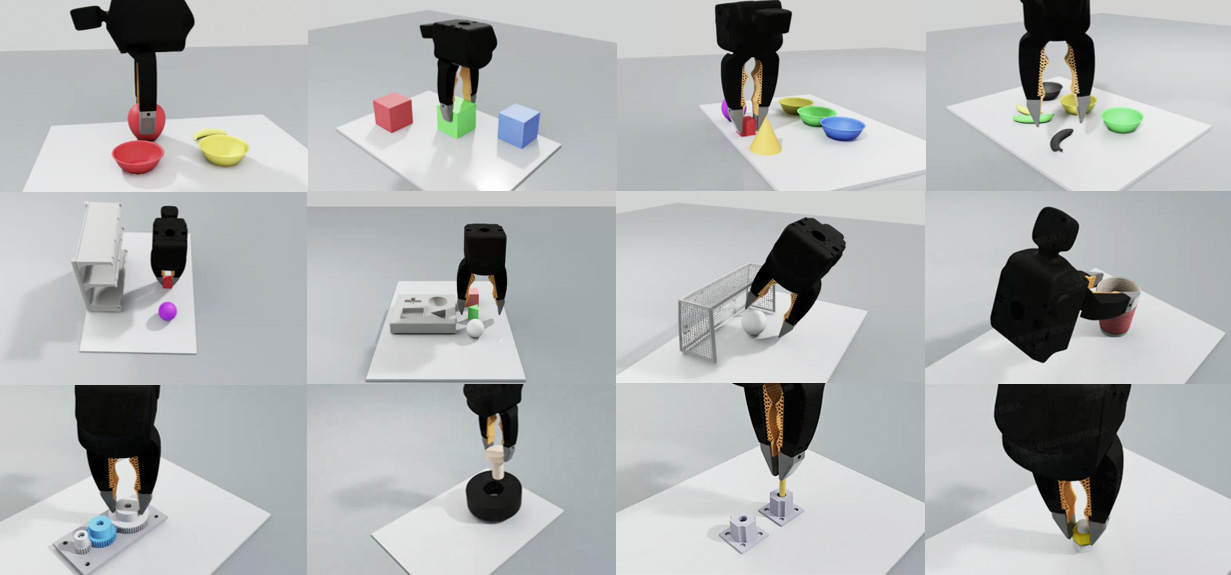
Unlike many robotics benchmarks that focus primarily on navigation, perception, or general task completion, RobOmni is centered on contact-rich manipulation tasks where tactile feedback plays a critical role.
The platform includes a standardized suite of manipulation benchmarks spanning multiple scenarios and task categories that closely reflect real-world robotic operations. These tasks are specifically selected because they depend heavily on physical interaction and tactile perception. Examples include grasping, placing, insertion, and component assembly.
By focusing on these foundational manipulation capabilities, RobOmni aims to provide a more meaningful measure of how effectively embodied AI systems interact with the physical world.
One of the industry's emerging challenges is evaluating AI models across different robot embodiments.
A manipulation policy developed for one robotic platform may not transfer directly to another. As humanoid robots, robotic arms, and mobile manipulators continue to evolve, benchmarking systems must accommodate a diverse range of hardware.
RobOmni incorporates a 1:1 digital twin of Daimon's DM-TacClaw tactile gripper while supporting multiple mainstream robot embodiments, including robotic arms and humanoid platforms.
This enables developers to compare performance across different systems using a unified evaluation framework rather than isolated testing environments.
Evaluating physical interaction is about more than determining whether a robot completes a task.
While task success rate and task completion remain the primary evaluation metrics, RobOmni introduces a broader set of benchmarking dimensions designed specifically for contact-rich manipulation.
These include:
One of the framework's distinguishing capabilities is support for tactile ablation studies. By evaluating the same model with and without tactile information, researchers can directly quantify the contribution of tactile sensing to robotic performance.
Powered by the world’s first monochromatic vision-based tactile sensing technology, Daimon has integrated “Sensing - Data - Model” into a complete capability ecosystem. In April 2026, Daimon released Daimon-Infinity, the largest omni-modal robotic dataset for physical AI, including high-resolution tactile sensing. Together, these milestones solidified Daimon's role in building the essential infrastructure for tactile sensing and dexterous manipulation.
The robotics industry has reached a stage where evaluation infrastructure is becoming as important as model development itself.
Large language models accelerated rapidly once standardized benchmarks enabled meaningful comparisons. Computer vision experienced a similar transformation through widely adopted evaluation datasets.
Embodied intelligence now faces a comparable opportunity. As tactile sensing gains attention as a critical component of physical AI, the industry needs a common language for measuring its value.
The question is no longer whether tactile matters. The question is how much it matters - and how the robotics community can measure it consistently.
By providing a standardized evaluation framework for tactile perception and physical interaction, Daimon aims to help answer that question and contribute to the next phase of physical AI development.
By driving the transition of physical interaction from being “demo-driven” to “standard-driven”, Daimon aims to build the key infrastructure for physical AI, accelerating the development of robots that can truly understand, interact with, and operate within the real world.

From geometry preparation to AI-assisted analysis, integrated CFD workflows…

Software-based GripperAI manages mixed picking through basic geometry

Safety, communication and motion control components enable smooth operation

North America’s largest robotics and automation event winds down