In this article, we explore the difference between the two main types of natural navigation technologies (sometimes called free navigation) for AGVs – scan matching and feature matching – along with their respective pros and cons.
What’s the difference between scan matching and feature matching?
Put simply, today’s natural navigation technologies use one of two different methodologies: scan matching (sometimes called SLAM navigation) and feature matching (used by ANT®).
How scan matching works
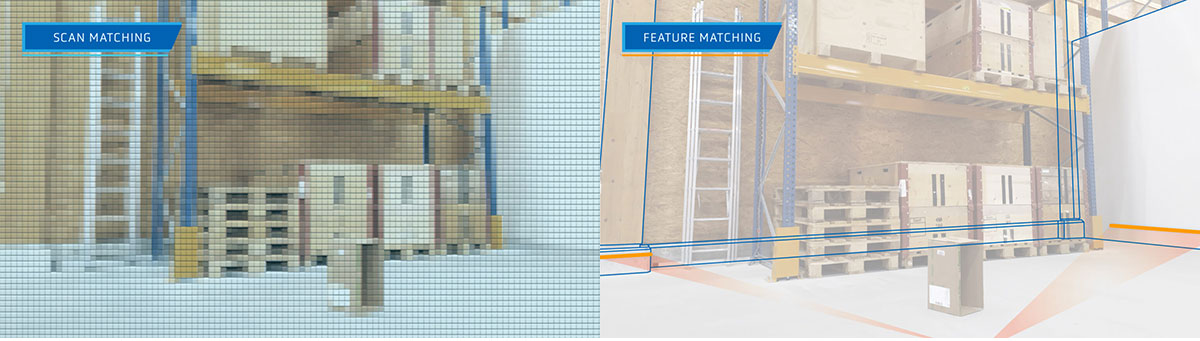
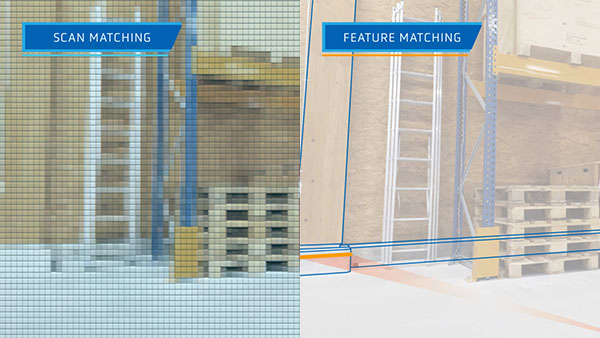
With scan matching technology, measurements from the vehicle’s laser scanners are compared (matched) to the cells of a grid-based reference map of the environment. These cells can be compared to pixels in a digital image.
To position (localize) itself in the map, the navigation system calculates the vehicle’s position using the matched points. At the same time, it uses odometry, which measures the vehicle’s change in position by computing its movement. In rare cases, a scan matching system will regularly update the reference map with what the vehicle has ‘seen’.

Scan matching technology matches many different parts of the environment to a reference map. Feature matching technology matches a handful of permanent features in the environment to a reference map.
How feature matching works
With ANT® feature matching technology, measurements from the vehicle’s laser scanners are compared (matched) to permanent map references (features) such as walls and pillars. Should part of a site not have enough distinctive features, reflective stickers can also be added to provide additional references.
A key benefit of matching features, rather than laser points, is that features are highly distinctive due to the specific size and angle of each. They are therefore simple for the system to identify and successfully match.
To localize the vehicle in the map, ANT® then uses a mix of odometry and feature matching, excluding all impermanent ‘dynamic’ objects (such as pallets, boxes, people and so on) from its calculations.
Because the resulting map contains only the coordinates of static, permanent features, it is much smaller in terms of file size than a grid-based map used by scan matching.
If the reference (grid) map of a vehicle using scan matching navigation can be compared to a digital image made up of pixels, then the reference map of a feature matching vehicle is similar to a line drawing.
Where are an AGV’s navigation scanners located?
Most feature matching (ANT® driven) vehicles do not use a dedicated laser scanner to navigate: instead they rely on their built-in safety laser scanners which are located at the base of the vehicle.
Feature matching vehicles will therefore detect unexpected objects such as a new stack of pallets – and the safety system will avoid collisions – but these dynamic objects will not be added to the vehicle’s map, as discussed above.
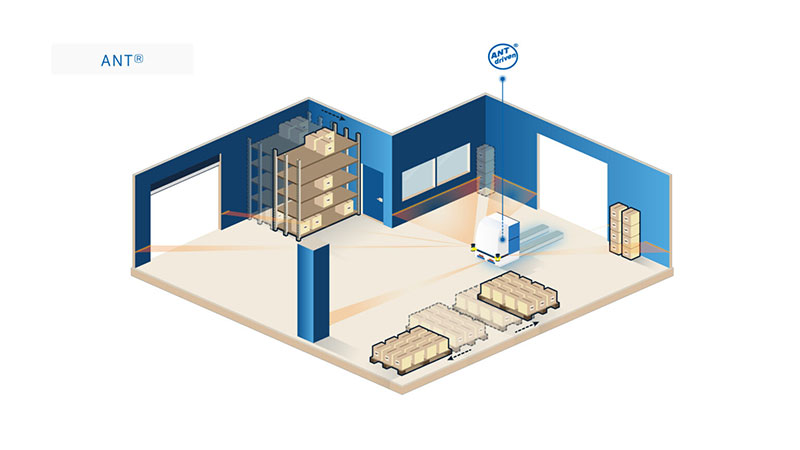
ANT® driven vehicles navigate accurately in a dynamic environment.
However, vehicles using scan matching often feature an additional laser scanner. This is usually positioned at the top of the vehicle to ensure as many points in the environment can be matched as possible.
Disadvantages of using an additional laser scanner
- Using an additional scanner adds an additional component cost for the vehicle maker (and likely a higher end price for the vehicle buyer).
- Each additional piece of hardware adds one more potential point of failure.
- Placing laser scanners at the top of the vehicle also restricts the types of vehicles a producer can offer to the market. For example, using a separate scanner for navigation does not enable a vehicle maker to produce low underride or ‘mouse’ type AGVs that are designed to move underneath carts.
- Lasers placed high on the vehicle are more sensitive to tilting or yawing caused by uneven surfaces or soft tires.

Is internet connectivity required for AGVs using natural navigation?
With feature matching, the map a vehicle uses never needs to be updated unless permanent features in the environment change. Therefore, ANT® driven vehicles do not need strong, consistent wifi access to run.
BlueBotics customers report that “spotty” on-site wifi (or Bluetooth or other wireless communication) is often sufficient. Low bandwidth connectivity is only required for server-led interactions, such as when vehicles interface with equipment (elevators, automatic doors), and for traffic control.
In comparison, if a vehicle uses scan matching technology that regularly updates the map, this requires strong, consistent wireless connectivity (not always the case in warehouses and on shop floors). This is because each updated map must be downloaded by each vehicle in the fleet from a central server, ideally in close to real-time. Remember, these incredibly detailed grid-based maps can have very large file sizes.
Which is more accurate – scan matching or feature matching?
It is not easy to ensure the repeatability and reliability of an AGV’s operations using natural navigation. However, ANT® achieves this repeatedly over time and without losing accuracy (approx ±1 cm / ±1°).
The precision of scan matching’s vehicle localization is comparable to the cell size of its reference map. To reduce file size, vehicles using scan matching often downgrade their maps, creating cell sizes between three and ten centimeters. This is not a limitation faced by ANT® driven vehicles as the reference map, containing only permanent features, is a smaller file size and does not need to be downgraded.
Additionally, because scan matching registers the entire environment – looking for matches – it also captures dynamic objects, which can move. For example, pallets may be regularly placed in one section of the loading dock. If they are always placed in exactly the same position, with centimeter accuracy, this would not cause any issues. But this is rarely the case.
Therefore, if these pallets are placed a few centimeters out of alignment, the vehicle may assume they are in the correct place, and adjust the rest of the map accordingly, anchoring the map to the incorrect placement and making every other point within it inaccurate.
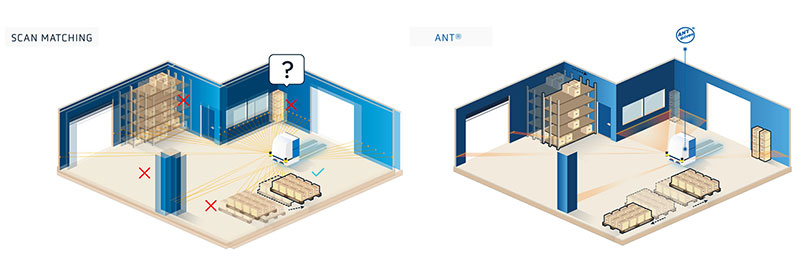
If an object is placed a few centimeters away from its expected location, this can potentially affect the positioning accuracy of a vehicle using scan matching technology. Because ANT® driven vehicles ignore objects which are not a permanent part of the environment, they are not susceptible to this issue.
If a vehicle using scan matching navigation updates the reference map with readings that are intrinsically imprecise, any errors will be uploaded to the system’s vehicle management server and the updated map downloaded to the rest of the fleet, potentially spreading and compounding the error.
In the same example, an ANT® driven vehicle would not record the location of the pallets at all. It would ignore them unless it is instructed to interact with them.
Which natural navigation technology should you choose?
Each business has its own unique challenges. But for ease of use, accuracy and the robustness in operation, we believe ANT® navigation is the clear choice for any vehicle type.
Related Resource

Comparing Autonomous Navigation Technologies
If you are looking to develop a new automated guided vehicle or mobile robot (or even upgrade an existing model), choosing the right autonomous navigation technology will be key to its success. Watch our recent webinar to take a deeper dive into more navigation technologies (including line following and tag following) View Now.
Article topics
Email Sign Up

Related Mobile Robots News




Related Companies
Related Resources










