Both system-directed, and swarm robots, are types of collaborative mobile robots, ones that work closely alongside your associates.
These types of systems attempt to increase productivity rates compared to manual cart picking by reducing unnecessary walking and manual labor, speeding up workflows and reducing training time. Both approaches can provide benefits over cart-based picking, but there are significant differences as well.
Before comparing and contrasting methodologies, let’s define each robotic approach.
System-directed picking robots
At its simplest, an associate meets a robot and is directed from pick to pick. This can be broken into traditional zones or utilize a more advanced technology like dynamic zoning, but the associates are generally performing a number of sequential picks with the same robot. This technology is typically used for order picks, batch picking, cycle counting and replenishment tasks. For ease of reference, we will refer to this method as “directed picking” throughout this piece.
Swarming robots
Swarming robots generally go to a specific pick location and wait for an associate to perform work. Once the work is completed, the swarm robot travels to the next pick location and the associate finds another swarm robot that has available work. This technology is typically used for order picks, cycle counting and replenishment tasks. For ease of reference, we will refer to this method as “swarming.”
When is it best to use directed picking over swarming?
The two robotic approaches exist because there are different circumstances when one is more effective than the other. Swarming robots can be effective in some operations, particularly in small, dense picking operations or ones with wide-aisle pallet picking. However, as an operation becomes more sophisticated, so do the number of significant advantages of directed picking robots. These include better scaling to large operations, better worker productivity and higher density warehouses.
Operation scaling
In any operation, there is generally a direct relationship between the square footage of a warehouse and the number of pickers on the floor. So, as warehouses increase in size, you will typically see more pickers. However, the relationship of space to pickers and space to robots are not the same between directed picking and swarming designs.
With directed picking robots, the quantities of robots are indicated by the number of pickers at your operation. Directed picking robots typically use 1.5 robots for each picking associate which ensures that as robots autonomously travel to and from work areas within a warehouse, each picker on the floor is still engaged in work with a different robot.
For example, a 50k square foot warehouse with 8 pickers might require 12 robots while a 500k square foot warehouse employing 24 pickers might need 36 robots. The robots lead associates through an optimized, directed workflow and manages dynamic zones in real time. This guarantees that the work associates are directed to complete is always in the most efficient way possible.
However, site designs using swarming robots recommend quantities of robots based on the square footage of a site rather than the number of pickers. Why is this?
In order to be efficient, swarming robots need a high density of robots in the picking area. Otherwise, the walking time between robots increases and efficiency rapidly drops. As the warehouse expands, this problem intensifies. For example, a 500k square foot warehouse would need 10x more swarming robots than a 50k square foot warehouse to maintain the same worker efficiency.
For larger operations, the ROI can not usually justify the cost of such large fleets of swarming robots. In response, swarming robotics companies recommend operational changes. One method is to allocate jobs where picks are all within the same area and focus associates there. However, it is highly unlikely that all of the picks within an order contain SKUs located within the same few aisles.
So, assuming they are not singles (which are often better picked in batches) a wave of picks that start as a densely-packed swarm of robots will eventually disperse throughout the warehouse, resulting in a drop in time between picks and a corresponding drop in efficiency. There are a number of ways that swarming robot providers try to address this, such as waving data across the warehouse and zone picking, but they don’t fundamentally address the density problem.
Another method is to sweep across the warehouse (pick everything from left to right or some other pattern). This can reduce robot density requirements a little bit, but it requires all of your associates to repeatedly walk the full length of the warehouse, causing inefficiency both in time and mistakes attributed to fatigue. To fix this problem you can organize associates into zones.
However, this just leads us back to the original problem: either there are enough robots to maintain pick face density (and the resulting capital cost of that many robots) or the warehouse is split into zones plagued by unpredictable workloads – some zones will be very busy while others are very light – which leads to overworked and/or idle associates. Ultimately, it is very difficult to effectively deploy a very large number of swarming robots within a large operation.
Worker productivity
One of the biggest advantages of a directed workflow is you can keep track of and directly influence the productivity of your associates. After removing “the long walk,” the next largest point of lost productivity is time between picks. As a result, this time between picks can be closely monitored and potentially mitigated.
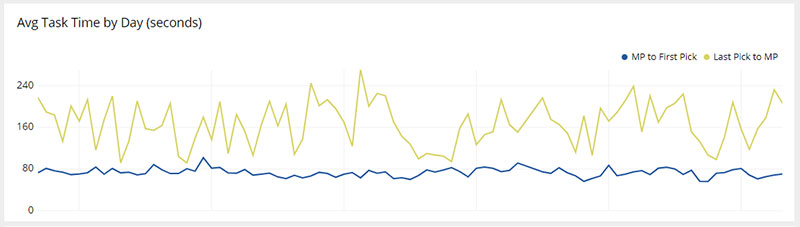
In the graph above, the blue line represents associates walking with a robot from the place they met the robot to their first pick, and the yellow line is the associates walking from the last pick going to meet a new robot, which they do without a robot.
As we can see in the chart above, when the associates are left to their own devices, they tend to be both less predictable and take a much longer time. In directed workflows, almost all of the associates movements are guided by the robot and keep them on track.
By comparison, with a swarming approach, the associates are never directed between tasks. The robot can indicate on its screen where the associate can find their next task, but much like what is illustrated by the yellow line in the graph above, associates are always left to pace themselves to that location. By being tasked to pace their own work, swarming robots fail to keep unsupervised associates engaged with the pick faces.
Warehouse density and aisle size
In a warehouse, you are generally trying to maximize the use of floor space. Directed picking robots allow for significantly narrower aisles by utilizing one-way aisles when necessary. This is not surprising, as it is the way that most cart pick operations work to leverage floor density. Essentially, an aisle only needs to be slightly wider than the directed picking robot.
For 6 River Systems’ Chuck, the minimum aisle width needed is 42 inches, which fits within most typical aisle layouts. Swarming robot vendors like to point out that Chuck needs wider aisles to pass each other, which is true, but this is not a real-world problem. They point this out to mask a significant shortcoming of swarming robots – large minimum aisle sizes.
Swarming robots, by their very nature, must be able to pass each other all the time or they get stuck. The swarming robot goes to a pick location to wait there for interaction with an associate. After the interaction is complete, it autonomously travels to its next task. If two robots end up in an aisle where they cannot pass each other, the system becomes deadlocked.
The associate will complete a task on one robot, which will then seek to move in either direction down the aisle. However, its motion in one direction would be blocked by the next robot and in the other direction, the picker. This means that the minimum aisle size has to be much wider to ensure the robots can pass each other. Swarming robot vendors quote 60” as a minimum size, which is significantly wider than most high density picking aisles.
Carrying capacity
“Can we put less on that robot?” asked no warehouse operator, ever. Although the size of a robot is not inherently linked to directed vs swarming methodologies, in practice it is much harder to make a large swarming robot since they must be able to pass each other in picking aisles.
Due to this fact, swarming robots in the industry tend to be small and provide less carrying capacity. Directed picking robots tend to have a much higher carrying capacity. As a result, picking paths and work is much more efficient.
For example, if a SKU is needed for 6 orders, the directed system will put all 6 of those orders onto the same robot and only visit its location once to retrieve all 6 items. Meanwhile these 6 orders in a swarming system will be allocated to 6 different robots and a picker will visit that same location 6 different times to pick them – increasing congestion on the floor and adding walking time for the associate.
Conclusion
As volumes spike up and labor gets harder to find, collaborative robots are definitely an important tool for modern fulfillment centers. There are use cases for both Directed Picking and Swarming robots. For small sites that are pallet picking with wide aisles, swarming robots can be very effective. As sites get larger and pick faces density goes up, there are significant advantages of using directed picking robots.
Related Resource

Collaborative Mobile Robotics Transform Fulfillment Operations
Transform fulfillment with the flexibility to meet increased demand and reduce costs. Download Now!
Related: Solving the Challenges of Traditional Zoning Methods 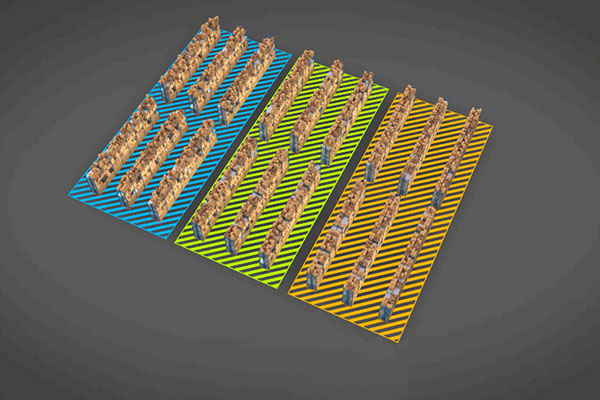
Article topics
Email Sign Up


Related Mobile Robots News




Related Companies
Related Resources