
Toyota Research Institute
The Punyo Soft Bubble Gripper was developed for household robots.
Get news, papers, media and research delivered. Sign up for our free newsletters.
Stay up-to-date with news and resources you need to do your job. Research industry trends, compare companies and get weekly market intelligence with Robotics 24/7.

Toyota Research Institute
The Punyo Soft Bubble Gripper was developed for household robots.
The Toyota Research Institute, or TRI, has developed soft grippers for domestic robot hands and today said it is sharing the design source files and full build instructions to help advance the technology. It is offering the materials on Punyo.tech so research institutions and aspiring roboticists can build their own Punyo Soft Bubble Grippers.
“The soft robotics community is small, and the visuotactile sensing community is even smaller,” said Alex Alspach, manager of the Robotics Tactile Team at TRI and the lead developer of the Punyo Soft Bubble Gripper. “By sharing the blueprints for this gripper with the world, we hope that our friends and colleagues can test our technology, improve upon it, and take us closer to building robotic assistants that help to provide independence, dignity, and joy to those with disabilities or age-related challenges.”
Established in 2015, the Toyota Research Institute aims to develop active vehicle safety and automated driving technologies, robotics, and other human amplification technology. Led by Dr. Gill Pratt, the Toyota unit said its researchers "use artificial intelligence to benefit society and improve the human condition by creating a future where everyone has the freedom to move, engage, and explore." TRI has offices in Los Altos, Calif.; Cambridge, Mass.; and Ann Arbor, Mich.
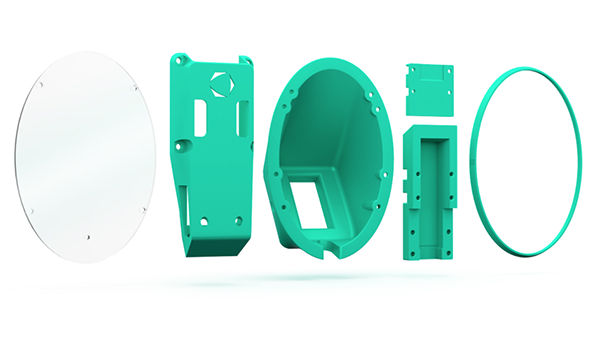
Building on recently published work, the Punyo project is changing the mechanics of robot manipulation and contact with the world, claimed the institute. Most robots today are hard to the touch and use rigid grippers, but TRI said its air-filled, elastic bubble design provides greater flexibility and better grasping.
When combined with cameras on the inside, the shape- and force-sensing gripper enables robots to respond to and control an object when it slips or moves, TRI said.
The Punyo bubbles use visuotactile sensing techniques that allow a robot to recognize objects by shape, track their orientation in its grasp, and sense forces as it interacts with the world. This feedback is critical as robots learn to push and pull on the world safely and robustly while assisting people by opening doors, putting things away, using household tools, and other domestic tasks, said TRI.
The Punyo Soft Bubble Gripper is freely available at Punyo.tech.
As part of its work to create a domestic robot, TRI is focusing on manipulators that can handle a wide variety of household objects to be useful. These grippers must be capable of stable grasps, precise placement and safe interactions during inadvertent contact. They must also be low cost. TRI engineers have designed a manipulator with all these capabilities called the Soft Bubble Gripper.

From geometry preparation to AI-assisted analysis, integrated CFD workflows…

Software-based GripperAI manages mixed picking through basic geometry

Safety, communication and motion control components enable smooth operation

North America’s largest robotics and automation event winds down