Faisal Mahmood, via ChatGPT
Advanced displacement sensors are crucial to next-generation robotics.
Get news, papers, media and research delivered. Sign up for our free newsletters.
Stay up-to-date with news and resources you need to do your job. Research industry trends, compare companies and get weekly market intelligence with Robotics 24/7.

Faisal Mahmood, via ChatGPT
Advanced displacement sensors are crucial to next-generation robotics.
For years, most robotic systems operated comfortably in the millimeter range. If a robot could repeat a position within a few tenths of a millimeter, that was usually good enough. In a lot of industries, it still is.
But in others, that level of precision just doesn’t hold anymore.
In semiconductor work, medical devices, optics and advanced electronics, tolerances have quietly moved into the micron range. And once you get there, things start behaving differently. Not dramatically, but just enough to cause trouble.
A surface that looks flat isn’t actually flat at that scale. A part that seems stable shifts slightly with temperature. A process that worked yesterday may behave a bit differently today, even though nothing obvious has changed.
The robot itself isn’t necessarily the problem. It’s still doing what it was programmed to do. The issue is that the real world isn’t lining up with the assumptions behind that program anymore.
So, the focus changes. It’s no longer just about repeating a path. It’s about knowing where you really are relative to the part, at the exact moment the operation happens.
That’s where displacement sensors come in. Not as an add-on, but as a way to bring real-world feedback into the process.
If you’ve ever taken a robot from a clean setup into full production, you’ve probably seen this pattern.
Everything looks fine at first. Then small inconsistencies start showing up. Not failures, just variation. Enough to make you start digging.
Most of that comes down to the physical reality of the robot.
Joints are not perfectly rigid. Even good gear systems have a bit of backlash, especially when changing direction. Under load, the arm flexes slightly. The amount changes depending on the pose and how forces are applied.
Then there’s temperature. Motors warm up. The environment shifts during the day. Over time, the geometry of the system moves just a little.
At a millimeter level, none of this is a big deal. At a micron level, it becomes visible.
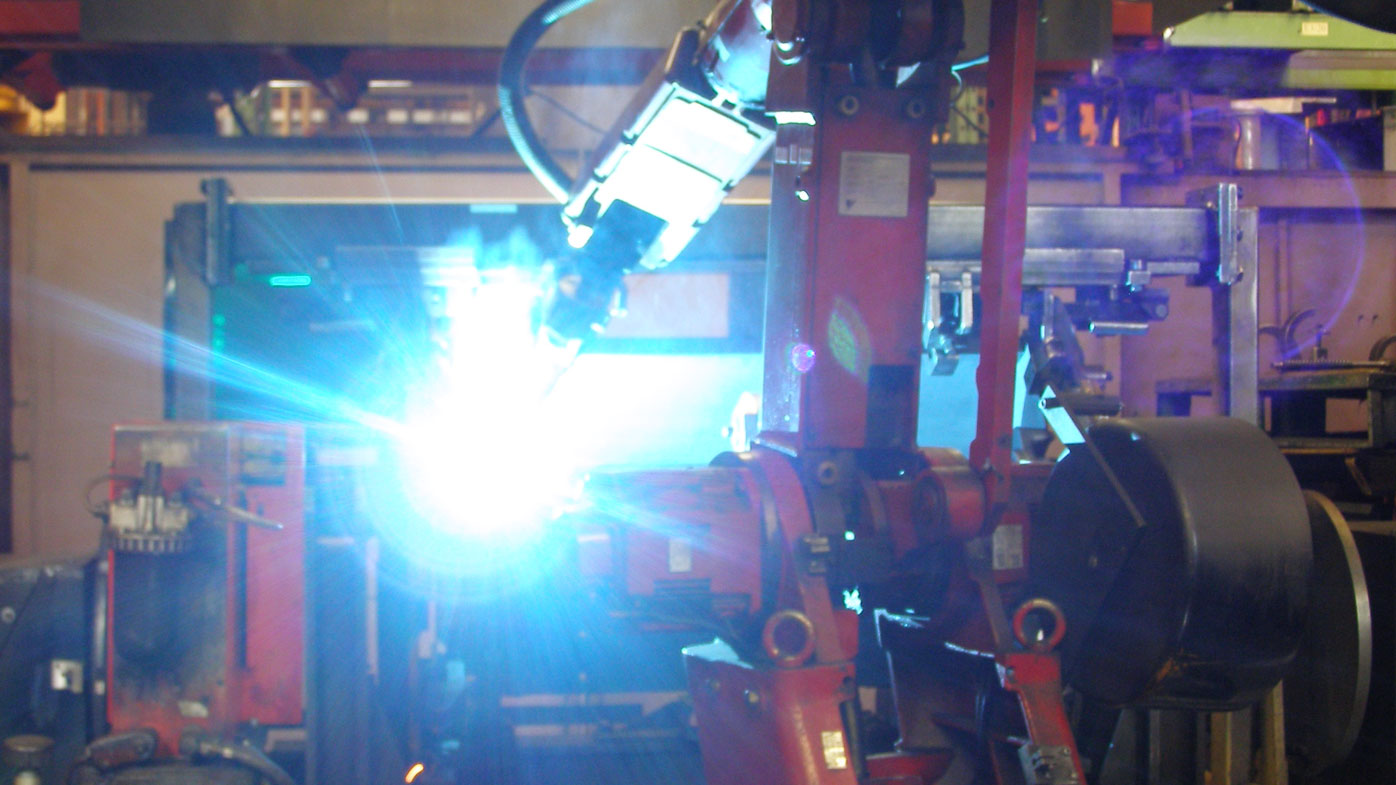
You start seeing things like connectors that don’t always seat cleanly, welds that vary more than expected, or finishing processes that leave subtle differences across parts.
The robot hasn’t lost accuracy. It’s just operating in a world that’s no longer as predictable as the program assumes.
And that’s the key limitation. Traditional robot positioning works best when the environment behaves exactly as expected. At higher precision, that assumption breaks down.
Displacement sensors don’t fix the robot. It changes how the system understands what’s happening.
Instead of assuming a surface is at a certain height, you measure it. Instead of trusting that a part is perfectly aligned, you check it. Instead of hoping nothing has shifted, you verify before acting.
That small change in approach makes a big difference.
Laser displacement sensors are usually where people start. The concept is straightforward. A laser spot is projected onto the surface, and the system tracks where that spot lands. As the distance changes, the position shifts and you get a measurement.
There are other options depending on the situation. Confocal sensors work better with transparent or layered materials. Capacitive sensors are used when you need extremely fine resolution over a very short range. Eddy current sensors are often chosen for metal surfaces, especially in less controlled environments.
Then there are camera-based systems that act more like surface scanners. They don’t always match single point sensors in precision, but they provide useful context.
In the end, the specific technology matters less than one thing: can you trust the measurement in real conditions?
Because if the measurement is stable and repeatable, you can build control around it. And that’s where displacement sensors in robot guidance actually start to pay off.
Once you start working at this level, you realize that accuracy doesn’t come from one feature. It comes from a lot of small things working together.
Take optical triangulation. The measurement sensitivity depends on the geometry. Shorter ranges usually give you better resolution because small distance changes create larger shifts on the detector.
The size of the laser spot matters too. A smaller spot picks up finer detail, but it also reacts more to surface texture. A larger spot smooths things out, but you lose some precision.
Signal processing is another piece. Raw data is noisy, so sensors apply filtering and averaging. That improves stability, but it also introduces a delay. In slower processes, that’s fine. In faster ones, it becomes a trade-off.
Thermal behavior is something people often underestimate. Sensors warm up. Mounting structures expand slightly. Even cables can behave differently as temperature changes. At micron resolution, these small effects start to show up.
And then there’s mounting. This is where many systems quietly lose performance. If the sensor is attached to something that vibrates or flexes, that movement becomes part of the measurement.
At this point, it becomes clear that achieving micron-level precision is less about buying a high-end sensor and more about controlling everything around it.
Where you place the sensor changes its usefulness.
Mounting it on the robot arm gives you measurement right at the point of interaction. That’s ideal for real-time feedback. You’re seeing exactly what the tool sees.
But it also means the sensor is moving. It’s exposed to vibration, acceleration and whatever the process environment brings. Cable routing becomes more critical, and small issues can turn into measurement noise.
Fixed mounting is simpler. You measure the part in a stable location before or after the process. This improves measurement stability but removes the ability to correct things during the operation itself.
In practice, many systems use both approaches. A vision system handles general positioning, and a displacement sensor refines the measurement where precision really matters.
There’s always a balance. A wider measurement range usually means lower resolution. Faster sampling can introduce more noise. Integration is about deciding what matters most for the process and designing around that.
This is where displacement sensing starts to change how robots behave.
Instead of following a fixed path and hoping everything lines up, the robot begins to adjust based on what it measures.
During setup, you can use adaptive teaching. The robot scans the actual surface and adjusts its path to match it, rather than relying on ideal geometry.
During operation, the system can go further. If a part is slightly warped or misaligned, the sensor picks it up and the robot compensates.
In processes like grinding or polishing, maintaining a consistent distance is critical. Displacement feedback allows continuous correction, which leads to more consistent results.
This is what closed-loop robot positioning using sensors really means in practice.
It’s not about making the robot perfect. It’s about giving it enough information to deal with imperfections.
One thing you quickly learn is that surfaces don’t behave consistently.
Highly reflective materials can send light in unexpected directions. Dark materials may not return enough signal. Rough surfaces create noise because the sensor is effectively seeing tiny variations.
Transparent materials add another layer of complexity, often producing multiple reflections from different depths.
There isn’t a single offering that works everywhere.
Sometimes adjusting the angle helps. Sometimes changing the wavelength improves stability. In more difficult cases, using multiple sensors from different angles gives better results.
Teach routines are also useful. You measure a known reference and use that to correct future readings.
The key is not to assume that the sensor will behave the same on every surface. It won’t. The interaction between the sensor and the material matters just as much as the sensor itself.
In electronics assembly, displacement sensors are often used to check coplanarity before placing components. By measuring height at multiple points, the system can detect tilt and adjust placement. This helps prevent solder defects and improves yield.
In robot-guided finishing, sensors provide real-time feedback on the distance between the tool and the surface. The robot adjusts its position to maintain a consistent condition, even when parts vary slightly.
In automotive and battery assembly, displacement sensors are used to measure gaps and alignment before joining operations. If something is out of tolerance, the system can correct or stop early.
In medical device assembly, where tolerances are extremely tight, displacement feedback allows more controlled insertion and alignment. The robot reacts to what it measures instead of forcing a predefined motion.
Most issues don’t come from the sensor itself. They come from how it’s integrated.
There’s also a tendency to add more sensors than necessary. That can increase complexity without improving results.
Another common mistake is treating sensor data as the absolute truth. In reality, there will always be noise and occasional outliers. Systems need basic filtering and sanity checks.
Simple practices make a big difference. Stable mounting, careful cable routing and regular reference checks help maintain consistent performance.
Sensors are gradually becoming more integrated into robotic systems.
They’re getting smaller, which makes it easier to place them close to the tool center point. That reduces the influence of robot mechanics on the measurement.
Different sensing types are also starting to work together. Displacement, force and torque data can be combined to give a more complete picture of the process.
At the same time, sensors are becoming more capable on their own. More processing is happening at the sensor level, which simplifies integration.
Over time, this will likely change how robots are programmed. Instead of fixed paths, systems will rely more on feedback and adjustment.
Micron-level precision isn’t something you add at the end. It has to be part of the system from the beginning.
Mechanical stability, sensor placement and control strategy all play a role.
Displacement sensors matter because they connect the robot to what’s actually happening in the real world. They replace assumptions with measurements.
They don’t remove variation. But they make it possible to deal with it in a controlled way.
And at the micron level, that’s really what precision comes down to.
Faisal Mahmood is a digital marketing and tech content strategist with a background in AI, software development and SEO-driven content. Mahmood is a content strategist and SEO specalist for ATO.com. He can be reached at [email protected].

From geometry preparation to AI-assisted analysis, integrated CFD workflows…

Software-based GripperAI manages mixed picking through basic geometry

Safety, communication and motion control components enable smooth operation

North America’s largest robotics and automation event winds down