Interact Analysis
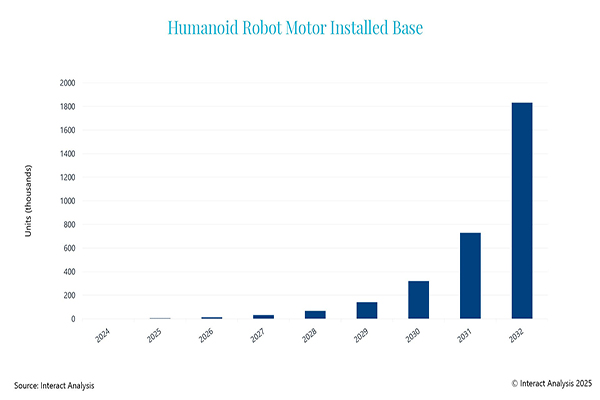
Interact Analysis predicts that high demand for actuators is expected to drive strong humanoid robot motors market growth.
Get news, papers, media and research delivered. Sign up for our free newsletters.
Stay up-to-date with news and resources you need to do your job. Research industry trends, compare companies and get weekly market intelligence with Robotics 24/7.

Interact Analysis
Interact Analysis predicts that high demand for actuators is expected to drive strong humanoid robot motors market growth.
Market research firm Interact Analysis reports that while several barriers will constrain humanoid robot market growth in the short to mid-term, the number of joints in each robot still presents a large opportunity for component vendors.
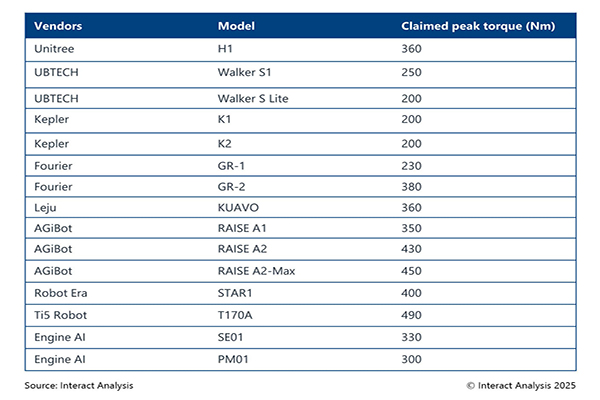
In the report, Humanoid Robots: Large opportunity but limited uptake in the short-to-mid-term, Interact Analysis highlighted the many components of humanoid robots, and specifically noted the importance of joint actuators for their crucial role in movement and motion control.
Among the many components of humanoid robots, Interact Analysis said the joint actuators undoubtedly play a crucial role, particularly in several key areas:
Although there are structural similarities between humanoid robot joints and collaborative robot joints, there are still many differentiated requirements that pose higher performance demands.
Among these, lightweight and miniaturization are the primary goals. And, as a result, high-torque density actuators are preferred. Lightweight joints help cut system weight, enhance flexibility and reduce the energy consumption of joints, thereby improving battery life. The anthropomorphic requirements arising from high adaptability to the human world mean that humanoid robot joints need human-like dimensions. For example, humanoid robots are expected to perfectly fit in the space designed for a human and be capable of using tools designed for humans. Therefore, humanoid robot joints require highly compact designs that tightly integrate relevant components such as motors, gearboxes, drives, encoders and even sensors into a single module.
Low energy consumption and low temperature rise are critical, especially for humanoid robots with numerous joints but limited battery space. The energy utilization and heat dissipation capabilities of joints directly affect their endurance and overall performance. Additionally, humanoid robots should be able to react in real-time within complex, changeable environments, which increases the requirements for joint dynamic control and adaptability. This poses higher challenges for joints’ peak torque and control algorithms.
Due to these differentiated technical requirements, in the early stages of development, there was a relative lack of standardized, low-cost joint products that fully adapt to humanoid robots on the market. Instead, many humanoid robot vendors chose to invest in designing and even manufacturing joint actuators themselves to meet the specific needs of their products.
However, with the rise of the humanoid robot industry, over the past 12 months more and more robot component manufacturers have begun to actively create high-performance, cost-effective integrated joint products. These companies are striving to seize opportunities and become Tier 1 core suppliers in the humanoid robot industry supply chain. This trend is expected to alleviate capacity constraints and the high cost of joint modules in the coming years, accelerating development of the industry, according to the Interact Analysis report.
Currently, hardware technology for humanoid robots is still iterating, with a wide variety of innovations emerging. One reason behind this is that the downstream market and application scenarios for humanoid robots are still in the early proof-of-concept (POC) stage.
Unlike the traditional industrial robots market, where mature applications have been developed, humanoid robots have enormous potential as a general-purpose automation platform. However, determining these specific scenarios will create significant productive value autonomously, and achieving efficient, reliable and scaled deployment still requires further exploration and validation.
This situation has created some uncertainty in the selection of hardware technologies. In joint design, although most manufacturers have reached a consensus on using harmonic modules for upper limb joints, there are still different technical offerings in the market. These include cycloidal actuators or quasi-direct drive solutions with extremely low gear ratios.
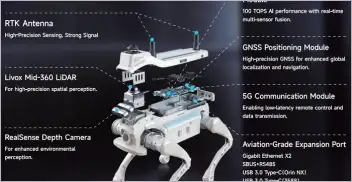
For lower limb joints, harmonic, planetary and RV rotary actuators and linear actuators based on screws all have corresponding manufacturers positioning themselves to lead the market. In terms of perception, although there appears to be consensus around multi-sensor fusion, identifying which specific sensor combinations to adopt and how to optimize fusion algorithms to adapt to different environments and tasks is still to be determined.
The diversity and rapid iteration of hardware technology routes reflect the innovative vitality of the industry on one hand, while on the other hand, companies both upstream and downstream of the industry supply chain need to prepare for multiple possibilities and invest more resources in R&D and real-world validation.
Which technology will eventually become mainstream largely depends on which specific scenarios can be successfully unlocked and scaled in the future: If humanoid robots achieve breakthroughs in the consumer sector first, then requirements for safety, low noise, low cost and human-machine interaction friendliness will be higher.
However, if they are widely applied in the industrial sector, then load capacity, operational efficiency and accuracy, and long-term reliability may be valued more highly. Therefore, hardware still needs more commercial deployment cases for validation and iteration to reach technical consensus and form industry standards. Interact Analysis said this will be crucial for the large-scale adoption of humanoid technology.
Artificial Intelligence Machine Vision Machine Learning Industrial Automation Collaborative Robots Components Batteries and Power Controllers Motion Control Motors and Drives Sensors Cameras Lidar News Press Release Human-Machine Interaction Humanoid Interact Analysis Market Research Reports Motion Control Perception Research & Development Research and Markets Safety
GENISOM AI makes ICRA debut at conference in Vienna
World's first omni-modal evaluation including tactile sensing for…

Ultrasonic sensing enhances robotics perception

Cybernetix Ventures’ event kicks off Robotics Tech Week 2026 slate of events