Flexiv
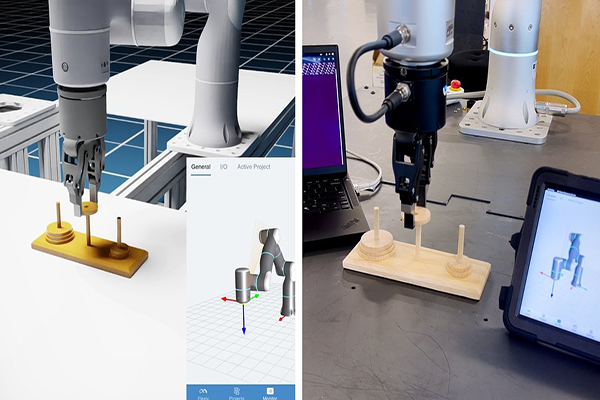
Virtual and real-world testing running simultaneously with the Flexiv-Issac Bridge App.
Get news, papers, media and research delivered. Sign up for our free newsletters.
Stay up-to-date with news and resources you need to do your job. Research industry trends, compare companies and get weekly market intelligence with Robotics 24/7.

Flexiv
Virtual and real-world testing running simultaneously with the Flexiv-Issac Bridge App.
Flexiv, a global provider of general-purpose robotics offerings, announced the release of the Flexiv-Isaac Bridge App.
The company stated that the Flexiv-Isaac Bridge App enables high-fidelity force-control simulation within NVIDIA's Isaac Sim.
This partnership allows robotics developers and end-users to program, model, test and deploy complex force-controlled, AI-empowered robotics applications in simulated environments that closely mimic contact-rich real-world conditions.
To demonstrate this new capability, Flexiv’s engineering team released a video (see below) in which a simulated Rizon 4 robot completed the classic Tower of Hanoi puzzle in Isaac Sim. The simulation exactly replicated the robot’s real-world movements and showcased its force-controlled "hole search" and compliant movement capabilities.
Flexiv said this underscores the company’s commitment to minimizing the sim-to-real gap to improve training, programming and operational performance. Additionally, the company added that this demonstration emphasizes Flexiv’s drive to ensure seamless compatibility with one of the world's most widely used virtual robotics platforms.
“Opening the door to compatibility between Flexiv and NVIDIA with the Flexiv-Isaac Sim Bridge App has enabled our industry-leading adaptive robots to leverage Isaac Sim’s powerful real-world physics engine,” said Xiyang Yeh, CTO of Flexiv. “This strategic integration empowers users to create force-dependent, true-to-life simulations that significantly accelerate application validation and streamline the optimization process. In short, we have made high-fidelity force-controlled simulations a reality.”
Isaac Sim enables developers to build hyper-realistic, detailed virtual environments, while Flexiv’s Elements programming system allows robotic applications to be easily programmed and refined.
With the Bridge App connecting these tools, Flexiv said customers are empowered to create applications, build digital twins of their facilities, design mission profiles and run high-fidelity virtual tests before deploying robots in real-world scenarios. These simulations provide valuable insights into application performance, risk assessment, and operational efficiency.
By using both Isaac Sim's ability to generate real-world simulations and Flexiv Elements' support for simulating real-world force-based actions, Flexiv said it aims to accelerate the application development cycle. With developers now able to refine robot movements and iteratively test applications from anywhere in the world, the company said it can reduce development costs while ensuring more reliability for in real-world deployments.
"Playing the Tower of Hanoi is a brilliant way to demonstrate the transfer from simulation to real-world under the Flexiv-Isaac framework, as it’s the exact same Python script functioning in both the simulation and reality without any code changes," said Peizhang Zhu, senior robotics software engineer at Flexiv. "Users can build an adaptive robot solution in Isaac Sim first, then deploy it to the real world, expecting the same outcome as in simulation. The framework has finally made simulation a practical component in the production process."
Flexiv said that in its continued commitment to community-driven innovation, the Tower of Hanoi codebase is freely available on GitHub.

From geometry preparation to AI-assisted analysis, integrated CFD workflows…

Software-based GripperAI manages mixed picking through basic geometry

Safety, communication and motion control components enable smooth operation

North America’s largest robotics and automation event winds down