NVIDIA
NVIDIA shared its Isaac ROS Developer Preview to provide new tools to programmers.
Get news, papers, media and research delivered. Sign up for our free newsletters.
Stay up-to-date with news and resources you need to do your job. Research industry trends, compare companies and get weekly market intelligence with Robotics 24/7.

NVIDIA
NVIDIA shared its Isaac ROS Developer Preview to provide new tools to programmers.
Robots are increasing in complexity, with a higher degree of autonomy, a higher number and diversity of sensors, and more sensor fusion-based algorithms. Hardware acceleration is essential to run these increasingly complex workloads, enabling robotics applications that can run greater workloads with more speed and power efficiency, according to NVIDIA.
The mission of NVIDIA Isaac ROS has always been to empower ROS developers with the accelerated computing packages and tools needed to develop high-performance, power-efficient robotics applications.
NVIDIA is also pioneering accelerated computing into ROS 2, and continuing to deliver improvements with each release. More than 20 hardware-accelerated ROS packages have been added in the past two years, with support for the latest ROS 2 distribution.
The company's team worked with Open Robotics last year to include adaptation and type negotiation to improve the ROS performance on compute platforms that offer hardware accelerators. They also implemented adaptation and type negotiation for Isaac ROS called NITROS (NVIDIA Isaac Transport for ROS).
The latest NVIDIA Isaac ROS Developer Preview 3 (DP3) release offers major updates and enhancements.
NVIDIA Isaac ROS DP3 includes many new features, enabling the ROS community to benefit from hardware acceleration. Highlights include a new map localizer to automatically localize the robot, updated NvBlox with human detection, the new ROS 2 benchmarking tool to realistically benchmark ROS 2 graphs, and open-source NITROS packages.
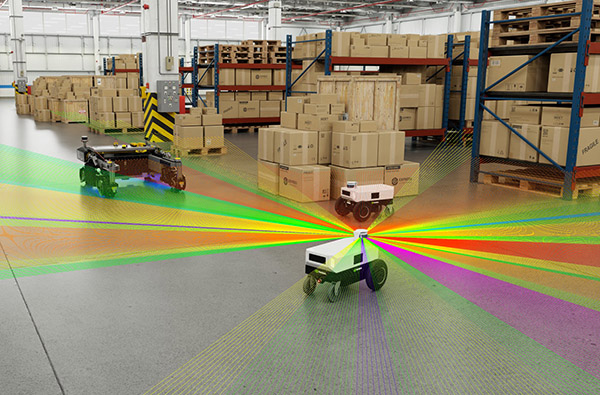
Mobile robots, such as those used in warehouses or service, need to know their initial pose in a map before starting to navigate the space. The most common method to provide this initial pose information to the robot is to manually set it. This method not only adds manual intervention to the whole process, but it can also take upwards of 30 seconds.
With the new Isaac ROS Map Location ROS package, there is no need to manually set the initial position and direction of the robot. This package uses lidar range scans to automatically estimate pose in an occupancy grid map in less than a half second.
The localizer can work with either planar or 3D lidar and can be used to initialize the navigation for mobile robots. This ROS package is GPU-accelerated and uses NITROS to create efficient ROS pipelines with no communication overhead. It is also integrated with Nav2.
For more information, see the Isaac ROS Map Localization package on GitHub.
Isaac ROS NvBlox provides a GPU-accelerated package for 3D reconstruction and a cost map of the environment around the robot using sensor observations. These are useful to path planners for generating collision-free paths.
Robots navigating among people need to first detect people and then navigate differently based on proximity to a person. Though people should be part of the cost map -- to calculate a collision-free path to avoid people -- they should not be part of 3D reconstruction. 3D reconstruction should include only static obstacles.
The updated Isaac ROS NvBlox package that is part of Isaac ROS DP3 release detects and segments people and provides a person cost map for avoiding collision with people. It also provides a static cost map for 3D reconstruction in order to avoid collision with static objects.
For more details, see the Isaac ROS NvBlox package on GitHub.
Benchmarking ROS-based graphs should reflect the performance under a realistic workload. Benchmarking the entire ROS graph (instead of a particular ROS node) is important, as it will include the message transport costs in RCL indicative of real-world performance.
Isaac ROS DP3 includes benchmark tooling for ROS 2 in open-source. This tooling does not require modification of nodes to measure results, and standardizes input rosbag data sets for independent verification of benchmark results.
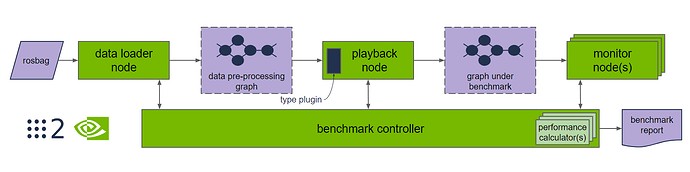
The benchmarking tool uses industry best practices and is professionally hardened for throughput and latency measurement of graphs of nodes in real-time robotics applications. Highlights include:
Roboticists and developers can register for the webinar "Performance Measurement of Robotics Applications with ros2_benchmark" to learn more.
Isaac ROS DP3 adds support for the newest members of the NVIDIA Jetson family, NVIDIA Jetson Orin Nano and NVIDIA Jetson Orin NX. It also supports the newly released NVIDIA Jetson Orin Nano Developer Kit. Isaac ROS is now supported on all Jetson Orin and Xavier series of modules and developer kits.
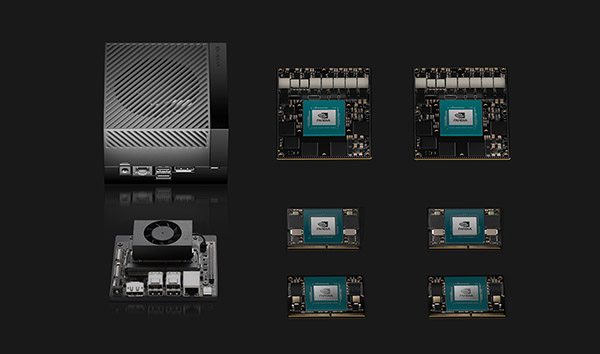
The new release also adds support for recently released NVIDIA Ada Lovelace architecture and NVIDIA GeForce RTX 40 GPUs.
Starting from this release, the majority of the NITROS accelerated Isaac ROS package is open-source. As an ROS developer, you can now extend the packages, fix any issues you encounter, and contribute back to the Isaac ROS community.
NVIDIA Isaac ROS Developer Preview 3 is a major update, enabling the ROS community to benefit from hardware acceleration to more easily build high-performance, power-efficient robotics applications. Highlights include the new ROS 2 benchmarking tool to realistically benchmark ROS 2 graphs, a new map localizer to automatically localize the robot, open-source NITROS packages, and updated NvBlox with human detection.
The company offers the following additional resources:
Engage with the community on the NVIDIA Isaac ROS Forum.

Suhas Hariharapura Sheshadri is a product manager at NVIDIA, focusing on Jetson software. He previously worked with the autonomous driving team at NVIDIA, optimizing system software for the NVIDIA Drive platform. In his free time, Sheshadri likes to read books on quantum physics and game theory.
HIL on NVIDIA Orin NX with Isaac ROS vslam and Nvblox
GENISOM AI makes ICRA debut at conference in Vienna
World's first omni-modal evaluation including tactile sensing for…

North America’s largest robotics and automation event kicks off

North America’s largest automation and robotics event takes place June 22-25