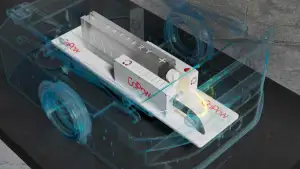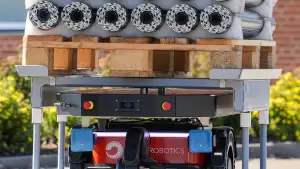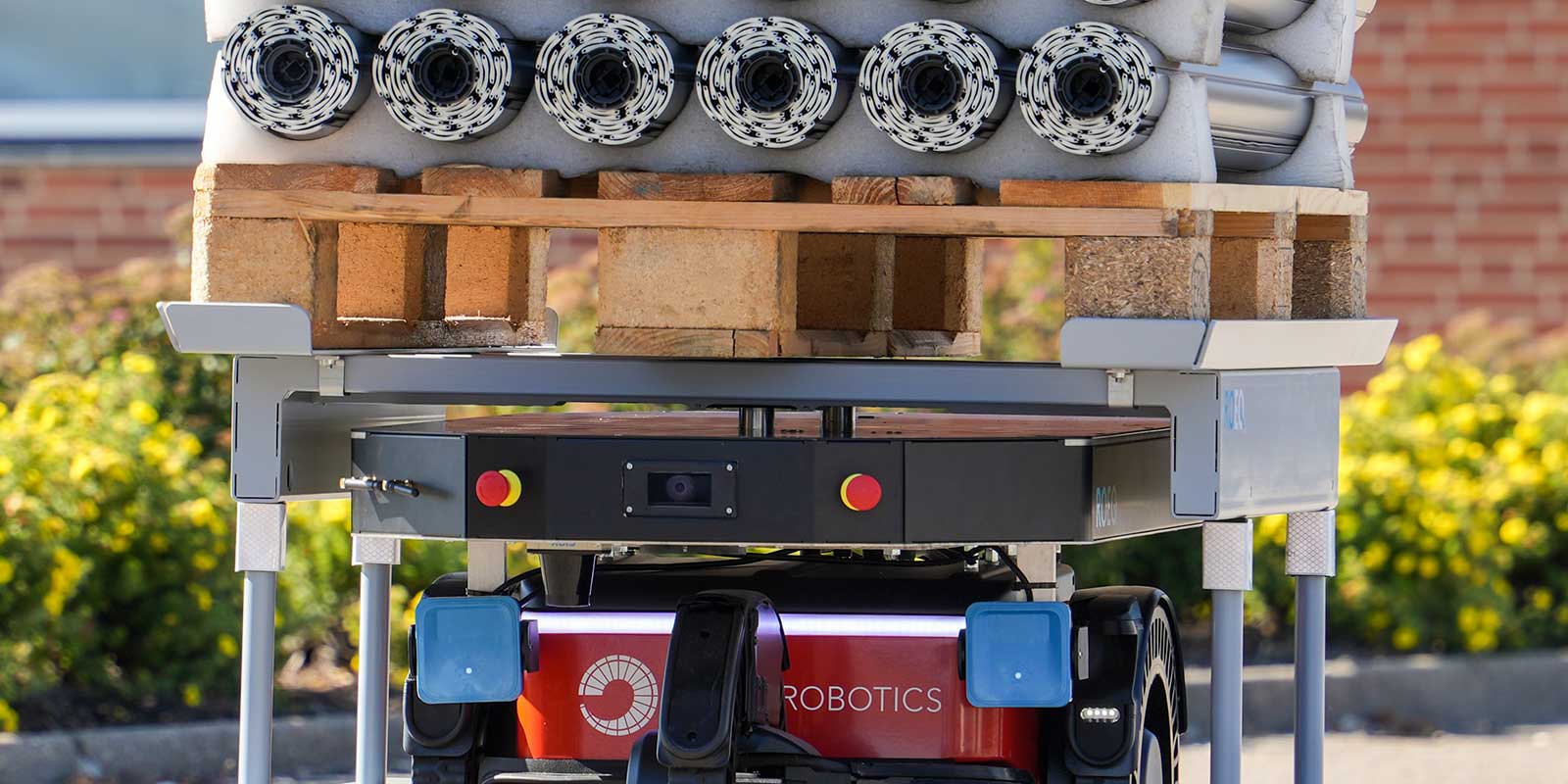
The Capra Carrier is an interlogistics material handling robot seamlessly bridging the gap between indoor and outdoor logistics. Transitioning from indoor to outdoor logistics still presents unique challenges for AMRs and AGVs. The robot and navigation system have an IP65 rating, are designed to operate in varying climate conditions and effortlessly navigate in strong sunlight, precipitation, low light and uneven terrain. This allows it to move goods safely and efficiently through even the most challenging and dynamic environments. Courtesy of the novel VSLAM system and high-precision docking, the robot supports automated loading and unloading of SLCs, racks, pallets and customer-specific packaging. Capra Carrier has a documented uptime of more than 10 hours and features automated charging, contributing to minimal downtime in operations. Capra Robotics, Booth N8556

GENISOM AI makes ICRA debut at conference in Vienna

World's first omni-modal evaluation including tactile sensing for…

Ultrasonic sensing enhances robotics perception

Cybernetix Ventures’ event kicks off Robotics Tech Week 2026 slate of events