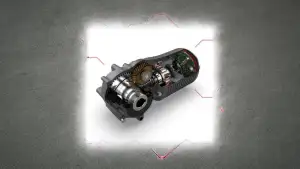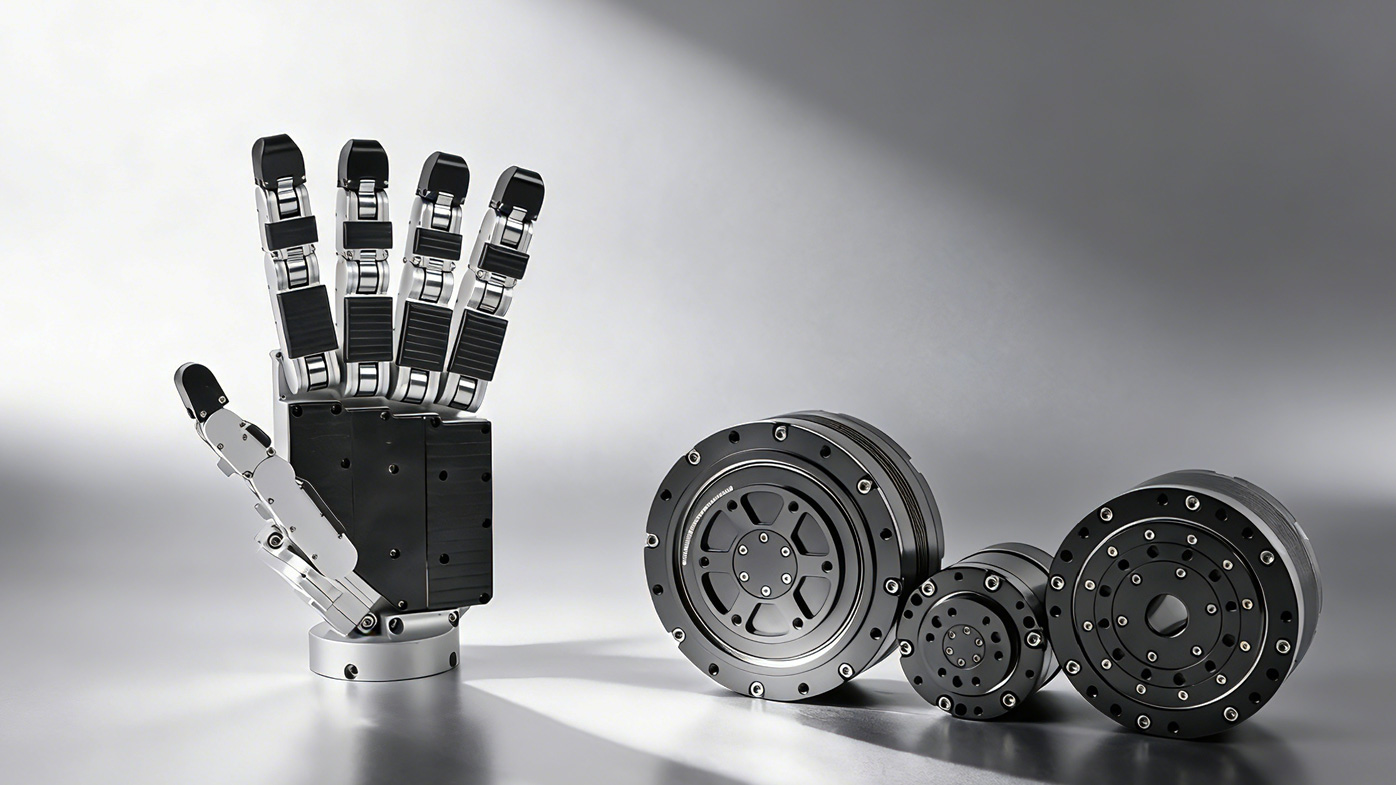
ENCOS has created joint modules and dexterous hands, endowing robots with flexible and precise movement and control capabilities to reshape industry standards. All ENCOS joint modules feature an integrated design centered on independently developed planetary reducers, paired with brushless DC motors and high-performance drivers. The Planetary Series joint modules boast high torque and high rigidity, making them ideal for load-bearing components such as a humanoid robot’s waist and legs. They handle high-intensity tasks including load-bearing walking and heavy object handling, enabling stable load capacity for robots in industrial scenarios such as 3C manufacturing and automotive production. The Planetary Hollow Series joint modules maintain high-load capacity, with a unique hollow structure allowing internal cable routing. This greatly optimizes the wiring design of the robot body, enhancing integration and motion flexibility. Additionally, the EC-Dexhand-5F is a 20-degree-of-freedom (DoF) bionic dexterous hand, engineered for high-performance robotic applications. Weighing 850g, it delivers exceptional dexterity without compromising load efficiency. ENCOS, encos.com, Booth 35003
GENISOM AI makes ICRA debut at conference in Vienna
World's first omni-modal evaluation including tactile sensing for…

Ultrasonic sensing enhances robotics perception

North America’s largest automation and robotics event takes place June 22-25